Improving code and phase observations using low-cost GNSS receivers in urban areas to achieve better accuracy in geo-monitoring
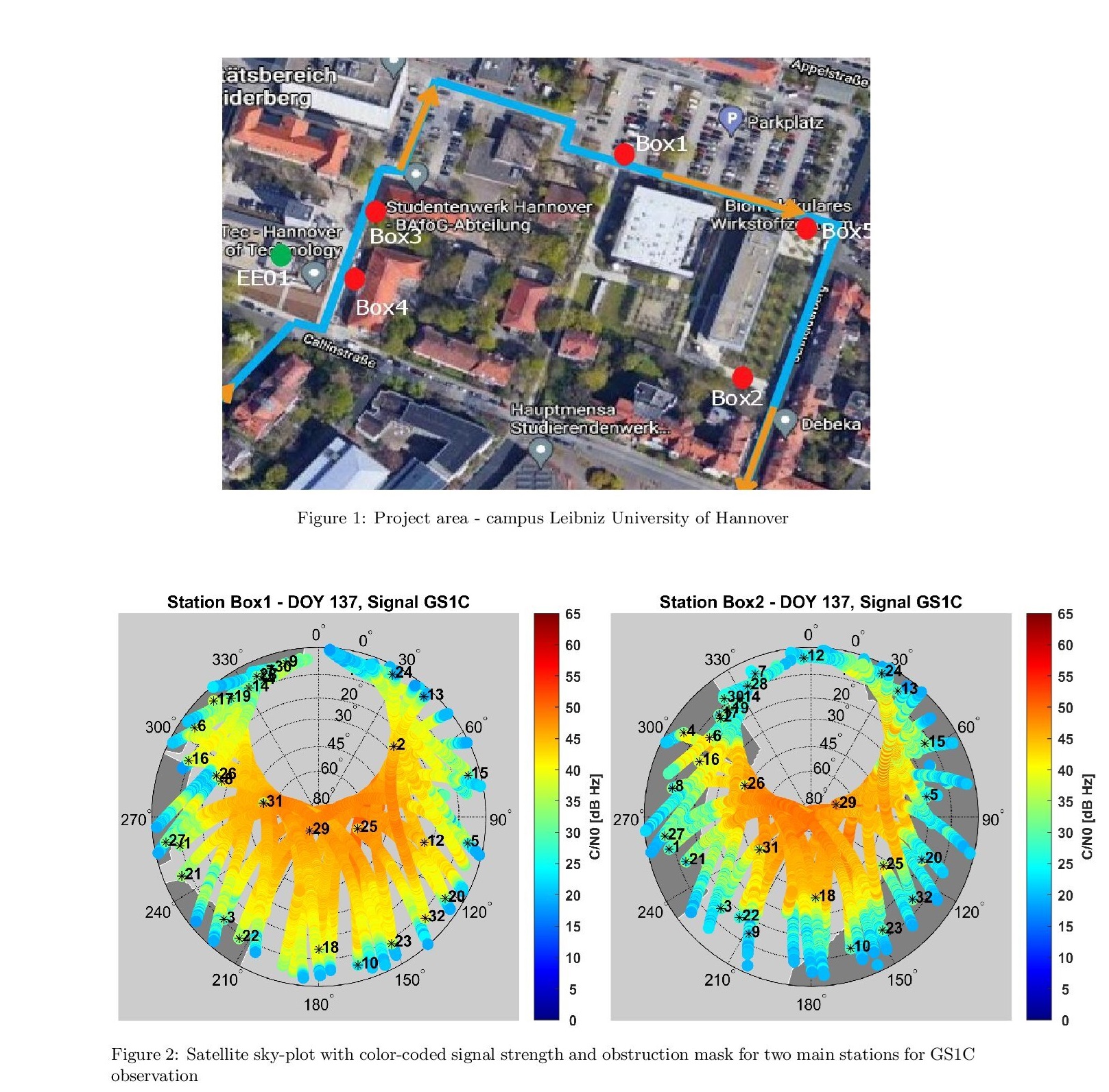
Subsidence due to sinkholes or old mining is especially critical in urban environments since large damage can occur and threaten lives and properties. Thus, adequate monitoring strategies are required. Low-cost GNSS equipment is one potential option for geo-monitoring, especially when installed on urban furniture like lamp posts to avoid vandalism or damage to the equipment. In this contribution, we report on test installations of low-cost GNSS receivers in the urban environment of the university campus of Leibniz University Hannover. Identical receiver-antenna units (Septentrio Moasic and Talyaman antennas) were installed in a compact box on top of lamp posts with different GNSS signal reception conditions. Taking exemplary data from these receivers, the first box positioned in an open-sky situation and the second located in an area with many obstacles, we will explain the different challenges and errors in improving raw GNSS observation data using different algorithms. Based on this analysis, optimized settings of our Kalman filterbased precise point positioning (PPP) algorithm are investigated in order to identify the maximum achievable accuracy for such challenging geo-monitoring tasks. The satellite geometry, receiver location, and antenna type affect the positioning quality. To achieve more accurate results in urban positioning, some elements in the PPP-KF process have changed and created eight scenarios. These scenarios include identical weighting, omitting short arcs and satellites with bad geometry, deleting block and Non-line-Of-Site (NLOS) signals regarding ray tracing, and increasing the elevation cut-off angle threshold. The original scenario consists of a weighted PPP-Kalman-based solution. So, each element has changed in each scenario and has been compared with the original one. Ultimately, all changes were combined and operated in the two latest scenarios, and the quality results were analyzed. The current status shows improvements in quality, correlation of observations, the number of errors like cycle slips, and finally, better accuracy in positioning for two boxes. Especially, these changes were better revealed in the second box, which had some limitations in observation availability because of its location. For example, the availability of code observations, from 82.99 percent to 84.95 percent, and phase observations have increased from 88.77 percent to 89.84 percent by using fewer visible satellites.